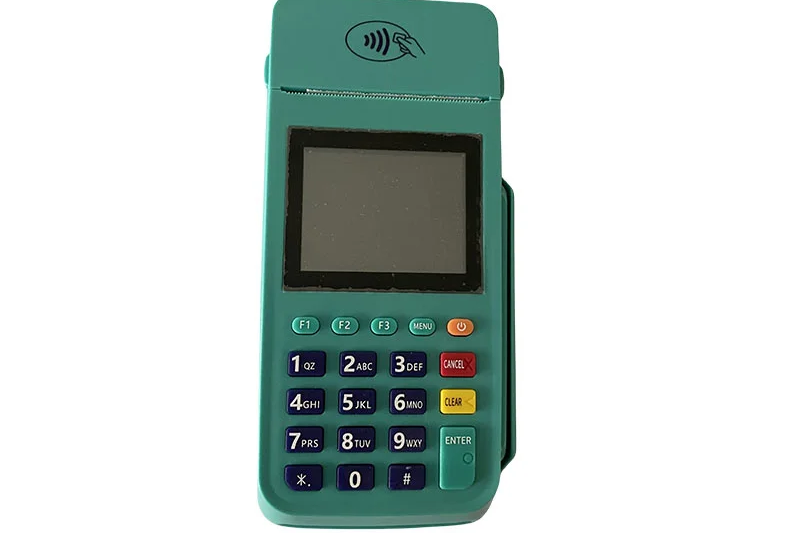
기능의 핵심은 무선으로 작동할 수 있는 능력에 있으며, 이는 기업이 유선 연결의 제약에서 벗어나게 합니다. 분주한 소매점, 분주한 야외 시장 또는 바쁜 이벤트 장소에서든,무선 POS 기계상인은 고객이 어디에 있든 서비스를 제공할 수 있습니다. 그 휴대성 덕분에 전용 체크아웃 카운터가 필요 없어지며, 판매 현장, 팝업 이벤트 또는 심지어 야외에서도 거래가 원활하게 이루어질 수 있습니다. 이러한 유연성은 고객 경험을 향상시킬 뿐만 아니라 기업이 다양한 환경에서 고객과 소통하고 도달 범위를 확장할 수 있는 새로운 기회를 열어줍니다.

기업들은 무선 POS 머신을 통해 거래를 촉진하는 것 외에도 그들의 운영에 대한 귀중한 통찰력을 얻습니다. 상인들은 실시간 데이터 분석 기능을 사용하여 판매 추세를 추적하고, 재고 수준을 모니터링하고, 고객 행동을 분석할 수 있습니다. 기업들은 이러한 정보를 활용하여 전략 최적화와 성장을 촉진하는 데 도움이 되는 정보에 기반한 결정을 내릴 수 있습니다. 이동 중에도 실행 가능한 데이터에 접근할 수 있는 능력은 오늘날 역동적인 비즈니스 환경에서 가발하고 반응할 수 있도록 상인들에게 힘을 줍니다. 무선 POS 기계로 기업들은 고객, 제품 및 시장 트렌드를 깊이 이해하고 경쟁자보다 앞서 나가면서 새로운 성장 기회를 창출합니다.

무선 POS 기계는 다양한 산업의 비즈니스를 위한 다목적 장치입니다. 소매, 환대, 음식 서비스 또는 이벤트 관리 등 다양한 비즈니스 환경에 적합합니다. 게다가, 그 기민함은 비즈니스가 전통적인 오프라인 매장을 넘어 새로운 기회와 고객의 변화하는 선호도로 확장할 수 있게 합니다. 따라서 음악 축제에서 결제를 처리하든, 푸드 트럭 집회 중이든, 기업 이벤트를 위해서든; 무선 POS 기계는 비즈니스 소유자가 시장의 변화에 맞춰 적응할 수 있도록 도와주며 여전히 고객의 요구에 부합합니다.
무선 POS 기계는 사업 효율성이 중요하기 때문에 작업을 단순화하는 데 최고 성과를 내고 있습니다. 이 도구는 더 쉽고 자연스러운 인터페이스와 사용자 친화적인 기능을 가지고 있으며, 이로 인해 거래 처리가 간단해지고 일반적인 운영 효율성을 향상시킴으로써 대기 시간을 절약합니다. 회사는 이러한 반복적인 임무를 자동화하고 핵심 역할을 중앙집중화함으로써 서비스 제공을 개선하고 고객 경험을 향상시킬 수 있습니다. 사업의 일반 비용을 줄이기 위해 운영을 간소화 할 수 있으며 무선 POS 기계는 수익 최적화를 돕습니다.

고객 참여 전략은 새로운 수준에 도달할 수 있습니다. 만약 기업이 무선 POS 머신을 채택한다면 말이죠. 이 장치는 상인들이 고객과 직접 접촉하고 신속하게 거래하고 완벽한 체크 아웃 서비스를 제공할 수 있게 합니다. 현장 결제는 소비자들 사이에서 편리하고 효과적이기 때문에 인기가 있습니다. 따라서 만족과 충성도가 증가합니다. 또한 이 기기의 휴대성으로 인해 비즈니스가 다양한 장소에서 고객과 상호 작용할 수 있으며, 따라서 더 나은 고객 관계와 브랜드에 대한 충성도를 구축합니다. 무선 POS 기기를 사용하면 비즈니스가 거래가 이루어지고 오랫동안 고객들의 마음에 남아있는 잊을 수없는 경험을 제공하여 구매의 반복을 촉구하고 브랜드 홍보에 대한 고객들의 충성도를 촉진 할 수 있습니다.

2015년에 설립된 베이징 저우 안푸 테크놀로지 컴퍼니 (Beijing Shenzhou Anfu Technology Co., Ltd) 는 모듈 및 보안 단말기 제품의 설계, 개발 및 판매에 전문화된 첨단 기술 기업이다. 우리 회사는 하이테크 기업 인증, 유니온페이 카드 수용 단말기 제품 기업 인증, 소프트웨어 기업
천진에 위치한 35,000 평방 미터에 이르는 광대한 공장을 통해 MPOS (모바일 판매점) 시스템에 전념하는 15개의 생산 라인을 운영하고 있습니다. 우리 직원은 고객의 진화하는 요구를 충족시키기 위해 혁신적인 솔루션을 제공하는 데 전념하는 700명 이상의 숙련된 인력을 포함합니다.
우리의 포괄적인 제품군에는 스마트 안드로이드 POS, 스마트 모바일 결제 터미널, 핸드헬드 POS 머신, POS 안드로이드 터미널, POS 핸드헬드 터미널, 스마트 POS 터미널, 미니 POS 머신, 무선 POS 머신, 안드로이드 기반 POS 머신, 그리고 전통적인 POS 머신 등이 포함
우리의 스마트 안드로이드 POS, 핸드헬드 POS 머신, 그리고 다른 제품들은 여러분의 POS 요구에 대한 단독 솔루션을 제공합니다. 포괄적인 하드웨어 옵션과 다재다능한 소프트웨어 통합 기능으로, 우리의 시스템은 기존의 설정에 원활하게 통합되어 첫날부터 원활한 운영을 보장합니다.
엄격한 생산 과정과 엄격한 품질 관리 조치로 지원되는 우리의 제품은 비교할 수 없는 품질과 신뢰성을 보장합니다. 제조 과정의 모든 단계는 최고 수준의 기준을 준수하고 있으며, 우리의 제품은 뛰어난 성능과 내구성을 보장하기 위해 철저한 품질 테스트를 거칩니다.
공장에서 직접 생산하는 제조업체로서 품질에 타협하지 않고 경쟁력 있는 가격을 제공합니다. 우리의 효율적인 생산 프로세스는 비용을 효과적으로 제어 할 수 있도록 해줍니다. 이를 통해 소비자에게 절감금을 전달 할 수 있습니다. 귀하의 특정 요구 사항에 맞춘 자세한 가격 정보를 얻기 위해 우리의 판매 팀과 연락하십시오.
우리의 제품으로 손쉽게 설치하고 설치할 수 있습니다. 포괄적인 교육 프로그램과 적극적인 유지보수 지원이 뒷받침됩니다. 초기 설정부터 지속적인 유지보수까지 저우 안푸는 원활한 경험을 보장해 주며, 여러분의 사업에 집중할 수 있게 합니다.

26
Mar무선 POS 기계는 무선 네트워크에서 작동하며, 어디서든 결제 수락을 위한 이동성과 유연성을 제공합니다.이와는 달리 전통적인 POS 시스템은 일반적으로 고정된 위치이며 작동을 위해 유선 연결이 필요합니다.
무선 POS 기계는 지불을 받아들이는 데 유연성을 제공하여 비즈니스가 이벤트, 시장 또는 야외 장소와 같은 다양한 장소에서 고객에게 서비스를 제공할 수 있습니다.또한 체크아웃 프로세스를 간소화하고 고객 만족도를 높이고 운영 효율성을 향상시킵니다.
무선 POS 기기를 통해 처리되는 거래는 첨단 암호화 프로토콜과 안전한 무선 연결 덕분에 매우 안전합니다.이것은 민감한 지불 정보가 전송 중에 보호되고 사기 또는 데이터 침해 위험을 최소화하는 것을 보장합니다.
결제 수용에 있어서 이동성과 유연성을 필요로 하는 모든 사업은 무선 POS 기기를 이용하는 것이 유리할 수 있습니다.여기에는 음식 트럭, 팝업 상점, 이벤트 판매자, 배달 서비스 등이 포함됩니다.

Block 1102-1103, Longyu Center, Building 1, Zhongjie 1, Huilongguan, Changping District, Beijing
Copyright © 2024 Beijing Shenzhou Anfu Technology Co. Ltd.개인정보 보호 정책
 EN
EN
 AR
AR BG
BG CS
CS DA
DA NL
NL FR
FR IT
IT JA
JA KO
KO PL
PL PT
PT RU
RU ES
ES TL
TL ID
ID LT
LT UK
UK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA AF
AF MS
MS MK
MK HY
HY AZ
AZ KA
KA BN
BN BS
BS LO
LO MN
MN NE
NE ZU
ZU MY
MY KK
KK UZ
UZ KY
KY